")





 Description
Description Specifications
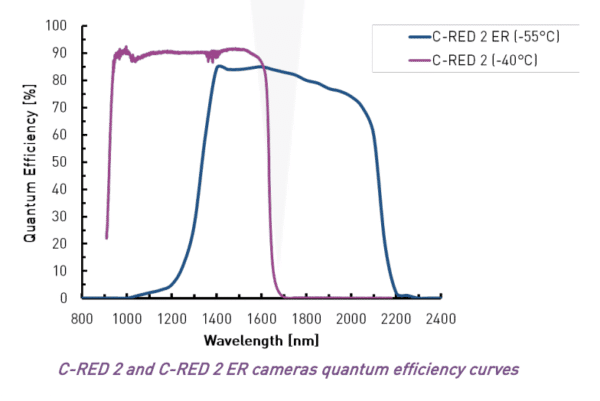
Specifications QE Curve
QE Curve Applications
Applications Downloads
Downloads Publications
Publications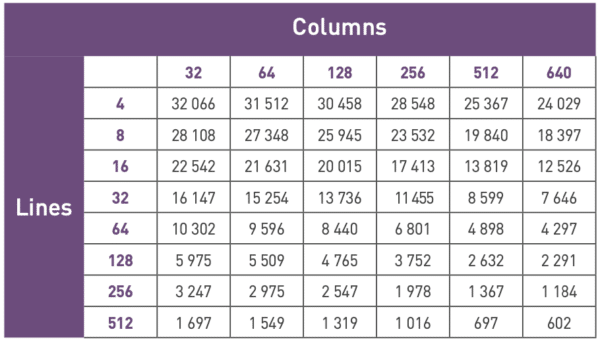
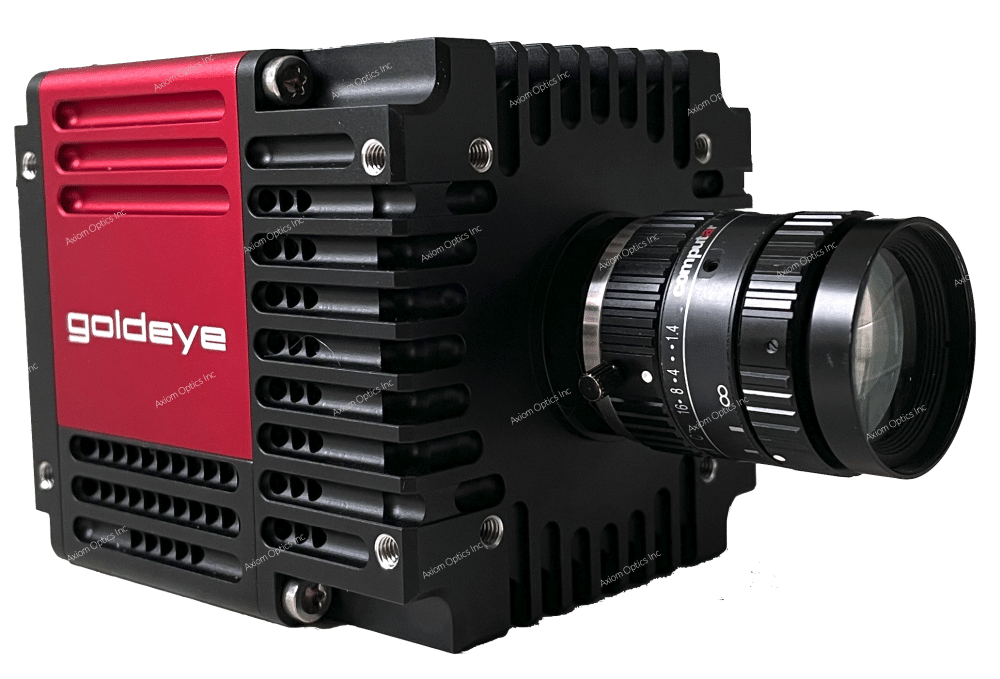
High-Speed Extended SWIR
C-RED 2 ER is high-speed eSWIR (extended shortwave infrared) InGaAs scientific camera with extended spectral range allowing:
- high-speed imaging (600Hz full frame)
- high sensitivity (60 e- of readout noise)
- high QE from. 1.4 to 2.1µm
Key features:
• Extended SWIR range. C-RED 2 ER is sensitive in the spectral range of 1300 to 2200 nm, which constitutes a shift compared to standard InGaAs based detectors. This enables C-RED 2 ER to target new applications!
• Specific factory-built correction map. The defects on the sensor, specific to extended range detectors, are corrected on-the-fly, offering very high image quality. The correction file is built by First Light Imaging.
• On-the-fly corrections. In addition to the factory-built correction map, bad pixel correction and a two-point NonUniformity Correction (bias and gain) can be applied in real-time.
• Easy integration. The camera can be easily integrated in a system thanks to the mechanical interfaces on each side, and has a C-mount optical interface. C-RED 2 ER is supported by our software First Light Vision. Additionally, thanks to a versatile SDK, the camera can be interfaced with MatLab, LabView etc.
CL or USB 3?
C-RED 2 uses the Camera Link® Full interface. This protocol requires 2 data cables.
The camera has been developed and tested with specific grabbers for which a full SDK + GUI are provided:
- Matrox Radient (ev-CL)
- Teledyne Dalsa (Xcelera-CL + PX8 Full)
- ETD (VisionLink F4)
C-RED 2 can also work with USB 3.1 Gen 1 interface(USB-C connector). In this configuration, C-RED 2 is detected as a composite USB device (control + acquisition interface).
Readout Modes and Integration Times:
The acquisition speed can be set from 0.01 to 600 fps, the integration time can be set from 20μs to ~1/fps.
Different available Readout Modes:
- Single Read: The entire frame is read before a reset period (with CDS)
- Integrated Multiple Readout (IMRO): he user must specify a number of multiple non-destructive reads which corresponds to a number of frames that are read and delivered at a selected speed. It’s a burst mode.
Cropping and Windowing:
It is possible to select one region of interest and acquire datas from this ROI only, column granularity is 32 and rows granularity is 4. Speed increases with read array reduction.
On-the-fly image optimization
First Light Imaging has developed a specific on-the-fly correction process to compensate the lattice mismatch artefacts of the extended range detector. The process corrects the image in real-time and can be applied to all gains and a large range of integration times. Importantly, the user has access to the image at all the steps of the process, including the initial raw image. Electronic board illuminated with ambient light. Before and after applying the full correction process.
- With the corrections applied, C-RED 2 ER extended swir camera has a very high experimental operability (> 98% at 600 FPS).
- The corrections are applied with no degradation of the image spatial resolution.
- All corrections are based on physical models. The corrected image yields full physical meaning and can be used for quantitative measurements.
- The entire correction process is applied on-the-fly without any loss of speed or restriction on frame rate.
Extended SWIR Camera Applications
ASTRONOMY:
Adaptive Optics
Astronomical Observations
Hyper-spectral Imaging
Laser Communications
INDUSTRY:
Multispectral Imaging
Quality/Production control
Laser
Sorting
LIFE SCIENCES:
OCT Imaging
Bio Imaging
Spectroscopy
Fluorescence Microscopy
Learn more about SWIR applications

C-RED 2 Software Requirements
In order to run First Light Imaging software, the recommended minimum system requirements are the following :
RAM : 8Go minimum, more for C-BLUE One UV
Processor : Intel® CoreTM i5 or higher
Screen resolution : at least 1920 x 1080
First Light imaging software is cross-platform :
Operating system
- Windows® 10 & Windows® 11
- Linux® Ubuntu 16.04 LTS, 18.04 LTS & 20.04 LTS
- NVIDIA® Jetson Tx2, Xavier NX and Nano (only with USB 3 interface)
- CentOS 7.9
SDK Plug-ins
- Matlab
- LabVIEW
- µManager
- Python