











 Description
Description Specifications
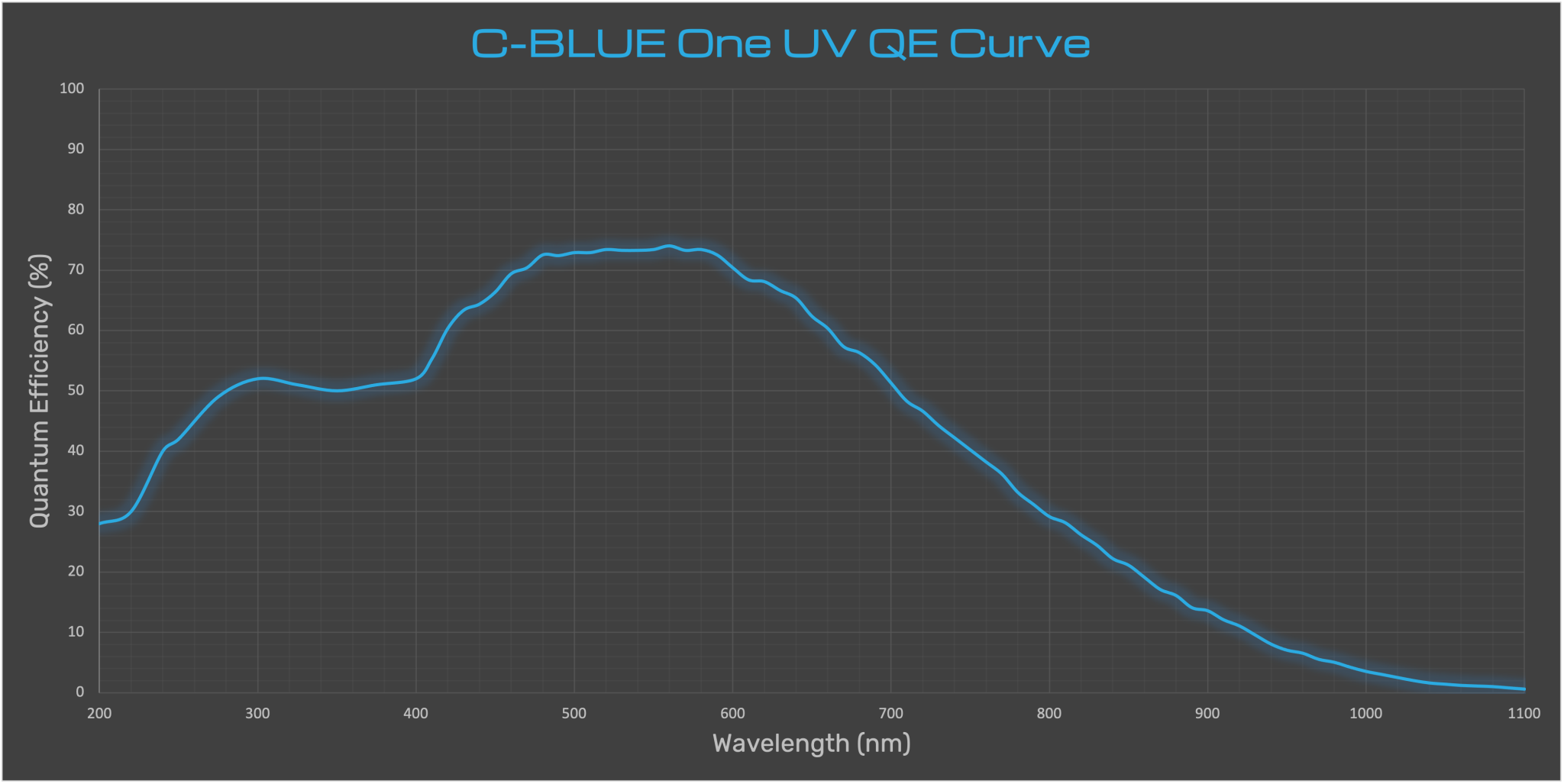
Specifications QE Curve
QE Curve Applications
Applications Pictures
Pictures Videos
Videos Downloads
Downloads Publications
Publications
C-BLUE One UV global shutter sCMOS camera, in a nutshell
The C-BLUE One high speed UV camera is an industrial-grade ultraviolet-optimized scientific camera which opens new possibilities for high-speed CMOS imaging. The camera offers a spectral sensitivity from 200 to 1000 nm.
Equipped with a high-performance monochrome CMOS global shutter sensor with a very high resolution of 8.1 MP (2848 x 2848 pixels, 2.74 µm pitch), the camera is optimized for the 200 – 400 nm wavelength range with more than 50% quantum efficiency at 300 nm, and 30% at 220 nm.
C-BLUE One is a GigE Vision camera and GenICam compatible.
C-BLUE One UV global shutter sCMOS camera, in more details
The C-BLUE One high speed UV camera offers a very low readout noise enabling imaging in ultra-low light conditions from visible to near-infrared, simultaneously with a global shutter architecture, enabling artefact-free acquisitions in dynamic imaging.
Rolling shutter vs. global shutter:
For a CMOS sensor, there are two ways to acquire an image:
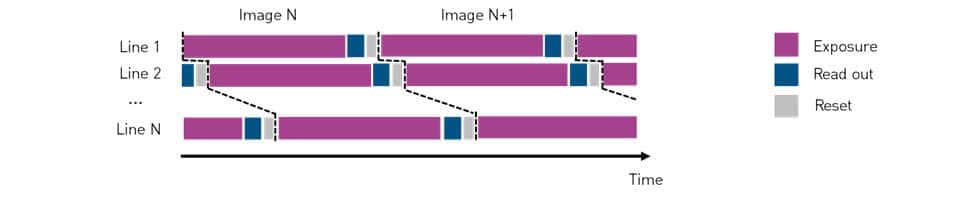
- Rolling shutter: The acquisition is made one line after the other, the sensor reads each line of the array sequentially. Pixels are exposed with a temporal shift from one pixel to the next.
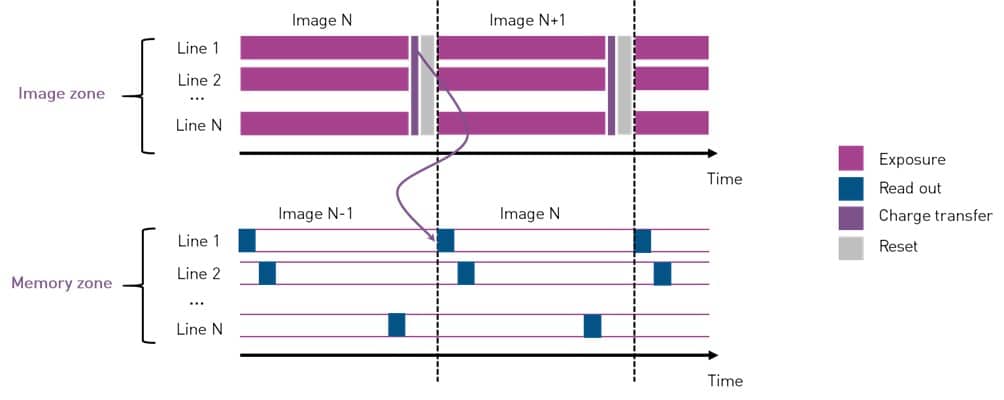
- Global shutter: The full array is exposed entirely at once. All the pixels begin and end the exposure simultaneously. At the end of exposure, the image is transferred to the memory. Then, the image is read-out while the next one is being exposed.
The acquisition mode is an intrinsic characteristic of the camera. However, it is important to understand the differences that will occur in an experimental context when using a camera with rolling or global shutter. Global shutter is highly advantageous for dynamic imaging applications for few reasons:
- Artifact-free: In rolling shutter when the image readout speed cannot match the object’s motion, there is temporal under sampling. A spatial distortion of the moving object, often referred to as the ‘rolling shutter effect’ appears. The larger the object and the faster the movement, the worst is the distortion. Additionally, as the sensor gets larger and with a higher resolution, the readout of the sensor will take longer, hence, the distortion will get worse. This artefact is different from motion blur which occurs in both global and rolling shutter when the integration time is too long compared to the object’s speed.
A well-known example of the rolling shutter effect occurs when imaging the rotation of blades or propellers. The figure below shows images of a rotating fan acquired in both rolling shutter mode (with a Nikon D500 camera) and global shutter mode (with C-BLUE One). Significant spatial distortion of the fan propellers is visible when using rolling shutter. 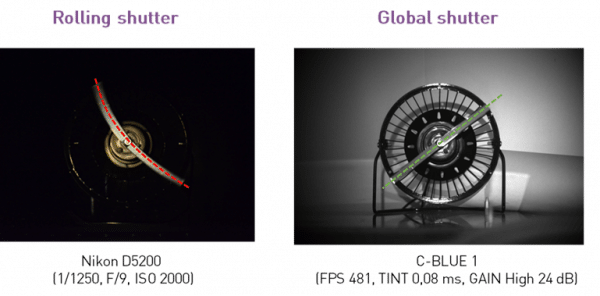 Temporal correlation: Even in the absence of distortion the top and the bottom of an image acquired in rolling shutter will not be captured at the exact same time point. Different regions of the image are not correlated in time to other regions. Whereas with global shutter, all pixels are exposed at the same time, allowing for accurate temporal correlation of different areas of the sensor.
Temporal correlation: Even in the absence of distortion the top and the bottom of an image acquired in rolling shutter will not be captured at the exact same time point. Different regions of the image are not correlated in time to other regions. Whereas with global shutter, all pixels are exposed at the same time, allowing for accurate temporal correlation of different areas of the sensor.- Simpler and faster synchronization: Synchronizing a rolling shutter camera to other components, such as a light source, can be difficult due to the time delay between the lines of the sensor. This may result in slower cycle times and frame rates relatively to those achievable in global shutter.
Why is C-BLUE One UV a game changer?
Rolling shutter uses simpler pixel architecture than global shutter. Therefore usually rolling shutter is less noisy than global shutter, this is why this architecture is used in scientific applications but with all its drawbacks. With C-BLUE One UV, simultaneously and for the first time a global shutter architecture and low noise is made possible, which is a major improvement for fast acquisition scientific applications.
By combining a global shutter and high frame rates (up to 170 fps in full frame) to very low noise, C-BLUE One UV opens new perspectives for applications that simultaneously require truthful/deformation-free images, high temporal resolution, and high sensitivity.
C-BLUE One UV will open new horizons for low noise high speed visible imaging.
High Speed UV Camera Applications
Research:
- Contamination detection
- Fluochemistry
- Mineralogy
- Entomology
- Electrophoresis
Industry:
- Gas leak detection
- Non-destructive inspection
- Forensic applications
- Hydrogen combustion analysis
Astronomy:
- Ultraviolet astronomy
- Hot plasma science
White Papers about C-BLUE One:
Publications about C-BLUE One:
- C-BLUE One: a family of CMOS high speed cameras for wavefront sensing. J.L. Gach, D. Boutolleau, T. Carmignani, F. Clop, I. De Kernier, P. Feautrier, M. Florentin, S. Lemarchand, J. Pettigiani, T. Romano, E. Stadler, J. Tugnoli, Y. Wanwanscappel. SPIE ATI Conference. July 2022.
- Performance of a complementary metal-oxide-semiconductor sensor for laser guide star wavefront sensing. Zibo Ke, Felipe Pedreros Bustos, Jenny Atwood, Anne Costille, Kjetil Dohlen, El Hadi, Jean-Luc Gach, Glen Herriot, Zoltan Hubert, Pierre Jouve, et al. HAL Open Science. May 2022.
- C-MORE: the laser guide star wavefront sensor. J.L. Gach, D. Boutolleau, A. Caillat, P. Feautrier, R. Pourcelot, E. Stadler. AO4ELT 6 Conference. June 2019.
First Light Vision GUI:
First Light Vision software is included with the C-BLUE One UV and is supported under the Windows and Linux OS. More information regarding the First Light Vision GUI software can be obtained under the “Downloads” tab.
First Light Imaging SDK:
The First Light Imaging SDK can be provided on demand and is compatible with Matlab, Python, C & C++. More information about the First Light Imaging SDK can be obtained under the “Downloads” tab.
Other Software Compatibility:
The C-BLUE One is can also be operated through Micro-Manager, LabVIEW & HALCON software.